Scritto dal Dr. Koen Vervaeke
Sintesi
Presentiamo un metodo per misurare la distribuzione del campo magnetico senza rumore dei magneti dei sensori degli encoder rotativi, basato sulla consolidata tecnologia delle telecamere a campo magnetico a 3 assi di Magcam. Il metodo prevede la misurazione della distribuzione del campo magnetico a 3 assi in un piano 2D a una distanza ravvicinata dal magnete e l'estrapolazione di questa distribuzione del campo in un volume 3D utilizzando un algoritmo brevettato di "filtro di distanza" che produce dati virtualmente privi di rumore a distanze maggiori. Questo potente metodo consente di valutare la distribuzione del campo magnetico e l'errore angolare intrinseco del magnete, con una risoluzione migliore di quella del piano originariamente misurato.
Contesto, motivazione e obiettivo
Viene presentato un metodo per caratterizzare magneticamente i magneti degli encoder rotativi a 2 poli, ampiamente utilizzati negli encoder angolari, ad esempio nei motori elettrici e nei sistemi di posizionamento rotativi. Il metodo utilizza un algoritmo proprietario di "filtro di distanza", che consente di estrapolare la distribuzione del campo magnetico registrata a una certa distanza (ravvicinata) da un magnete o da un gruppo di magneti a un'altra distanza (maggiore) in modo molto rapido e con una forte soppressione del rumore di misura. Ciò consente misure molto rapide e allo stesso tempo molto accurate, rendendo il metodo adatto al controllo di qualità della produzione.
Il metodo del filtro a distanza
L'algoritmo Distance Filter viene utilizzato in combinazione con i sistemi di telecamere per campi magnetici di Magcam. Quando l'estrapolazione avviene nella direzione lontana dal magnete, si ha una forte soppressione del rumore, con conseguente risoluzione del campo magnetico in µTesla. Ciò rende l'algoritmo Distance Filter molto potente per determinare le distribuzioni di campo magnetico a grande distanza da un magnete, poiché una misura diretta a una distanza maggiore soffrirebbe di un rapporto segnale/rumore più scarso.
Per ottenere risultati accurati con il filtro di distanza, la distribuzione del campo magnetico registrato deve contenere l'intero campo magnetico del magnete o del gruppo di magneti misurati, il che significa che su tutti i bordi dell'immagine del campo magnetico misurato il campo magnetico deve diminuire monotonicamente verso lo zero quando si va verso i bordi dell'immagine. In pratica, ciò significa che deve essere misurata un'area sufficientemente ampia, compreso lo spazio extra intorno al magnete.
Risultati
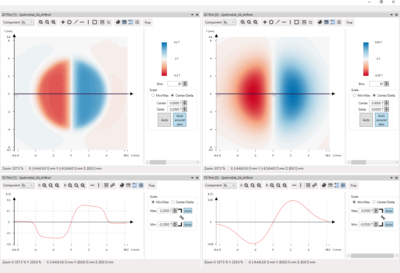
Consider a cylindrical axially magnetized 2-pole rotary encoder magnet, with the cylindrical symmetry axis pointing in the Z direction. The original measurement is in the XY plane at a certain height Z0 above the magnet surface. The magnetic field distribution at a different height Z1 is obtained by the Distance Filter method by supplying one single input parameter Delta, namely the distance between the original measurement plane and the desired plane: Delta = Z1 - Z0. When Delta > 0 the extrapolation takes place in the direction away from the magnet. When Delta < 0, the extrapolation is in the direction towards the sample. When Delta = 0 the original data is retained.
La Figura 1 mostra la distribuzione del campo magnetico Bz misurato e la sezione trasversale lungo la direzione X a Z0 = 0,3 mm (a sinistra) e il risultato del filtro di distanza a Z1 = 2 mm (a destra). Il valore di Delta è quindi: Delta = 2 mm - 0,3 mm = 1,7 mm.
Analisi dell'errore Bxy e dell'angolo azimutale nei magneti degli encoder rotativi a 2 poli
In una tipica applicazione finale, un sensore Bx,By è posizionato sull'asse di simmetria del magnete dell'encoder rotativo a una certa distanza dalla superficie del magnete, in genere diversi mm. A tale distanza il campo magnetico Bxy è tipicamente dell'ordine di 50mT. Il sensore Bx,By misura quindi Bx e By e da questi calcola l'angolo in piano del campo magnetico utilizzando atan2(By,Bx). A causa delle disomogeneità della distribuzione del campo magnetico, esiste un certo errore sul valore dell'angolo misurato. Durante il controllo di qualità di tali magneti, questo errore angolare deve essere determinato con un'elevata precisione, in genere dell'ordine di 0,1° o superiore. Utilizzando una telecamera per campi magnetici in combinazione con il filtro di distanza, è possibile ottenere questo risultato in modo ottimale, come illustrato di seguito.
Una misurazione della distribuzione del campo magnetico direttamente alla distanza di lavoro del sensore Bx,By nell'applicazione sopra descritta avrebbe un rapporto segnale/rumore più scarso rispetto a una misurazione molto vicina al magnete (in genere 0,3-0,5 mm). Il filtro di distanza consente di "preservare" il rapporto segnale/rumore da distanze ravvicinate a distanze remote, ottenendo distribuzioni di campo magnetico virtualmente prive di rumore.
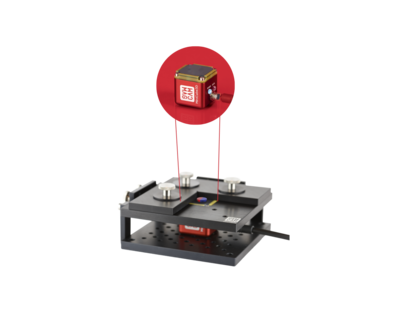
La distribuzione del campo magnetico 3D viene misurata a una distanza ravvicinata dalla superficie del magnete utilizzando una telecamera per campi magnetici 3D Magcam MiniCube (vedi Fig. 2).
Come già detto, le componenti del campo magnetico rilevanti per questa applicazione sono il campo magnetico in piano (Bxy) e la direzione in piano (angolo azimutale) del campo in una regione al centro del magnete. Queste componenti possono essere analizzate come spiegato di seguito.
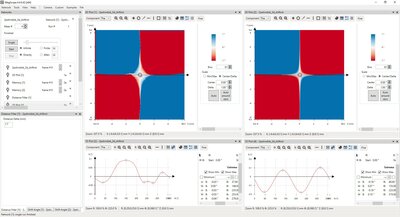
Componente Bxy e angolo azimutale
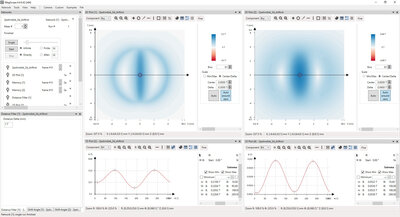
La componente Bxy si ottiene facilmente dalle componenti Bx e By del campo magnetico (Fig. 3). Viene interpolato un cerchio centrato sul centro del magnete e con un certo raggio, che in questo esempio è di 0,25 mm, tipicamente determinato dalla regione di tolleranza in cui il sensore Bx,By sarà posizionato nell'applicazione finale. Nel grafico a linee ottenuto, è possibile rilevare automaticamente i valori massimi e minimi, che possono essere utilizzati direttamente in un test pass/fail per verificare se rientrano nella finestra di tolleranza.
La seconda grandezza importante della distribuzione del campo magnetico è la distribuzione della direzione in piano (angolo azimutale) del campo magnetico. Anche questa grandezza è facilmente calcolabile dalle componenti Bx e By del campo magnetico utilizzando atan2(By,Bx). Analizzando i valori estremi dell'angolo azimutale sulla stessa sezione circolare di prima, si ottiene direttamente l'errore angolare, come illustrato nella Fig. 4.