Geschrieben von Dr. Koen Vervaeke
Zusammenfassung
Wir berichten über eine Methode zur Messung der rauschfreien Magnetfeldverteilung von Drehgeber-Sensormagneten, die auf Magcams etablierter 3-Achsen-Magnetfeldkamera-Technologie basiert. Diese Methode umfasst die Messung der 3-Achsen-Magnetfeldverteilung in einer 2D-Ebene in geringem Abstand über dem Magneten und die Extrapolation dieser Feldverteilung in ein 3D-Volumen unter Verwendung eines patentierten "Abstandsfilter"-Algorithmus, der praktisch rauschfreie Daten in größeren Abständen liefert. Diese leistungsstarke Methode ermöglicht die Auswertung der Magnetfeldverteilung und des intrinsischen Winkelfehlers des Magneten mit einer Auflösung, die besser ist als die Messauflösung der ursprünglich gemessenen Ebene.
Hintergrund, Motivation und Zielsetzung
Es wird eine Methode zur magnetischen Charakterisierung von 2-poligen Drehgebermagneten vorgestellt, die weithin in Winkelgebern, z. B. in Elektromotoren und rotierenden Positioniersystemen, verwendet werden. Die Methode verwendet einen proprietären "Abstandsfilter"-Algorithmus, der es ermöglicht, eine Magnetfeldverteilung, die in einem bestimmten (geringen) Abstand über einem Magneten oder einer Magnetanordnung aufgezeichnet wurde, auf einen anderen (größeren) Abstand zu extrapolieren, und zwar auf sehr schnelle Weise und mit einer starken Unterdrückung des Messrauschens. Dies ermöglicht sehr schnelle und gleichzeitig hochgenaue Messungen, wodurch sich die Methode für die Qualitätskontrolle in der Produktion eignet.
Die Methode des Abstandsfilters
Der Distanzfilter-Algorithmus wird in Kombination mit den Magnetfeld-Kamerasystemen der Magcam verwendet. Wenn die Extrapolation in die vom Magneten entfernte Richtung erfolgt, kommt es zu einer starken Unterdrückung des Rauschens, was zu einer Auflösung des Magnetfelds im µTesla-Bereich führt. Dies macht den Distanzfilter-Algorithmus sehr leistungsfähig für die Bestimmung von Magnetfeldverteilungen in großer Entfernung von einem Magneten, da eine direkte Messung in größerer Entfernung ein schlechteres Signal-Rausch-Verhältnis aufweisen würde.
Um mit dem Abstandsfilter genaue Ergebnisse zu erzielen, muss die aufgezeichnete Magnetfeldverteilung das gesamte Magnetfeld des gemessenen Magneten oder der gemessenen Magnetbaugruppe enthalten, d. h. an allen Rändern des gemessenen Magnetfeldbildes sollte das Magnetfeld monoton gegen Null abnehmen, wenn es nach außen zu den Bildrändern hin abnimmt. In der Praxis bedeutet dies, dass ein ausreichend großer Bereich gemessen werden sollte, einschließlich des zusätzlichen Raums um den Magneten.
Ergebnisse
Consider a cylindrical axially magnetized 2-pole rotary encoder magnet, with the cylindrical symmetry axis pointing in the Z direction. The original measurement is in the XY plane at a certain height Z0 above the magnet surface. The magnetic field distribution at a different height Z1 is obtained by the Distance Filter method by supplying one single input parameter Delta, namely the distance between the original measurement plane and the desired plane: Delta = Z1 - Z0. When Delta > 0 the extrapolation takes place in the direction away from the magnet. When Delta < 0, the extrapolation is in the direction towards the sample. When Delta = 0 the original data is retained.
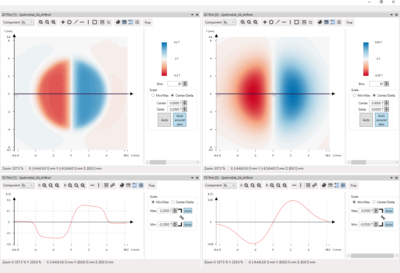
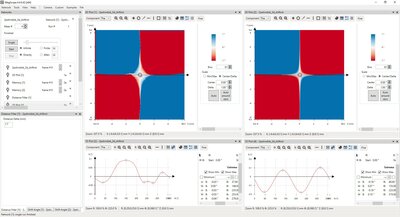
Abbildung 1 zeigt die gemessene Bz-Magnetfeldverteilung und den Querschnitt entlang der X-Richtung bei Z0 = 0,3 mm (links) und das Ergebnis des Distanzfilters bei Z1 = 2 mm (rechts). Dabei ist der Wert für Delta: Delta = 2mm - 0,3mm = 1,7mm.
Analyse des Bxy- und Azimutalwinkelfehlers in 2-Pol-Drehgebermagneten
In einer typischen Endanwendung wird ein Bx,By-Sensor auf der Symmetrieachse des Drehgebermagneten in einem bestimmten Abstand von der Magnetoberfläche positioniert, der typischerweise mehrere mm beträgt. Bei einem solchen Abstand liegt das Bxy-Magnetfeld typischerweise in der Größenordnung von 50mT. Der Bx,By-Sensor misst dann Bx und By und berechnet daraus mit atan2(By,Bx) den in der Ebene liegenden Winkel des Magnetfeldes. Aufgrund von Inhomogenitäten in der Magnetfeldverteilung gibt es einen gewissen Fehler bei diesem gemessenen Winkelwert. Bei der Qualitätskontrolle solcher Magnete muss dieser Winkelfehler mit hoher Genauigkeit bestimmt werden, typischerweise in der Größenordnung von 0,1° oder besser. Durch die Verwendung einer Magnetfeldkamera in Kombination mit dem Distanzfilter kann dies in hervorragender Weise erreicht werden (siehe unten).
Eine Messung der Magnetfeldverteilung direkt im Arbeitsabstand des Bx,By-Sensors in der obigen Anwendung würde zu einem schlechteren Signal-Rausch-Verhältnis führen als eine Messung sehr nahe am Magneten (typischerweise 0,3-0,5 mm). Der Abstandsfilter ermöglicht es, das Signal-Rausch-Verhältnis bei geringen Abständen bis hin zu entfernten Abständen zu "bewahren", was zu praktisch rauschfreien Magnetfeldverteilungen führt.
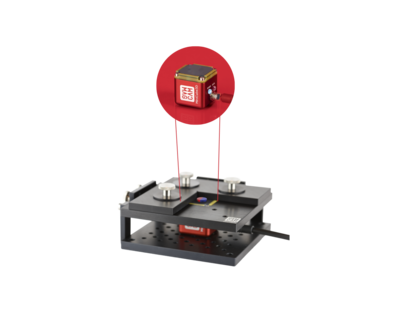
Die 3D-Magnetfeldverteilung wird in geringem Abstand über der Magnetoberfläche mit einer Magcam MiniCube 3D-Magnetfeldkamera gemessen (siehe Abb. 2).
Wie weiter oben erwähnt, sind die relevanten Magnetfeldkomponenten für diese Anwendung das Magnetfeld in der Ebene (Bxy) und die Richtung des Feldes in der Ebene (Azimutwinkel) in einem Bereich in der Mitte des Magneten. Diese Komponenten können wie unten erläutert analysiert werden.
Bxy-Komponente und azimutaler Winkel
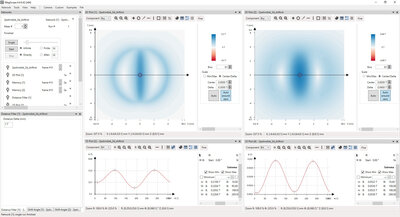
Die Bxy-Komponente lässt sich leicht aus den Bx- und By-Komponenten des Magnetfelds ermitteln (Abb. 3). Es wird ein Kreis interpoliert, der in der Mitte des Magneten zentriert ist und einen bestimmten Radius hat, der in diesem Beispiel 0,25 mm beträgt und typischerweise durch den Toleranzbereich bestimmt wird, in dem sich der Bx,By-Sensor in der Endanwendung befinden wird. In dem erhaltenen Liniendiagramm können die Maximal- und Minimalwerte automatisch erkannt werden, die direkt in einem Pass/Fail-Test verwendet werden können, um zu prüfen, ob sie innerhalb des Toleranzfensters liegen.
Die zweite wichtige Größe der Magnetfeldverteilung ist die Verteilung des Magnetfelds in der Ebene (azimutaler Winkel). Diese Größe lässt sich ebenfalls leicht aus den Bx- und By-Komponenten des Magnetfelds berechnen, indem man atan2(By,Bx) verwendet. Durch Analyse der Extremwerte des azimutalen Winkels auf demselben Kreisausschnitt wie zuvor erhält man direkt den Winkelfehler, wie in Abb. 4 dargestellt.