Rédigé par le Dr. Koen Vervaeke
Résumé
Nous présentons une méthode permettant de mesurer sans bruit la distribution du champ magnétique des aimants des capteurs de codeurs rotatifs, basée sur la technologie de la caméra de champ magnétique à 3 axes de Magcam. Cette méthode consiste à mesurer la distribution du champ magnétique sur 3 axes dans un plan 2D à une faible distance au-dessus de l'aimant et à extrapoler cette distribution du champ dans un volume 3D à l'aide d'un algorithme breveté de "filtre de distance" qui permet d'obtenir des données pratiquement exemptes de bruit à de plus grandes distances. Cette méthode puissante permet d'évaluer la distribution du champ magnétique et l'erreur angulaire intrinsèque de l'aimant, avec une résolution supérieure à la résolution du plan mesuré à l'origine.
Contexte, motivation et objectif
Une méthode est présentée pour caractériser magnétiquement les aimants des codeurs rotatifs à 2 pôles, qui sont largement utilisés dans les codeurs angulaires des moteurs électriques et des systèmes de positionnement rotatifs, par exemple. La méthode utilise un algorithme propriétaire de "filtre de distance", qui permet d'extrapoler une distribution de champ magnétique enregistrée à une certaine distance (proche) au-dessus d'un aimant ou d'un assemblage d'aimants à une autre distance (plus grande) de manière très rapide et en supprimant fortement le bruit de la mesure. Cela permet d'obtenir des mesures très rapides et en même temps très précises, ce qui rend la méthode adaptée au contrôle de la qualité de la production.
La méthode du filtre de distance
L'algorithme du filtre de distance est utilisé en combinaison avec les systèmes de caméra de champ magnétique de Magcam. Lorsque l'extrapolation se fait dans la direction opposée à l'aimant, il y a une forte suppression du bruit, ce qui permet d'obtenir des résolutions de champ magnétique de l'ordre du µTesla. L'algorithme du filtre de distance est donc très puissant pour déterminer les distributions de champ magnétique loin d'un aimant, puisqu'une mesure directe à une distance plus éloignée souffrirait d'un moins bon rapport signal-bruit.
Pour obtenir des résultats précis avec le filtre de distance, la distribution du champ magnétique enregistrée doit contenir le champ magnétique complet de l'aimant ou de l'assemblage d'aimants mesuré, ce qui signifie qu'à tous les bords de l'image du champ magnétique mesuré, le champ magnétique doit diminuer de façon monotone vers zéro en allant vers l'extérieur en direction des bords de l'image. En pratique, cela signifie qu'une zone suffisamment grande doit être mesurée, y compris l'espace supplémentaire autour de l'aimant.
Résultats
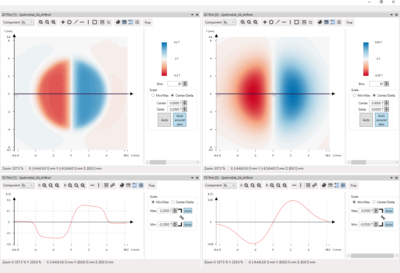
Consider a cylindrical axially magnetized 2-pole rotary encoder magnet, with the cylindrical symmetry axis pointing in the Z direction. The original measurement is in the XY plane at a certain height Z0 above the magnet surface. The magnetic field distribution at a different height Z1 is obtained by the Distance Filter method by supplying one single input parameter Delta, namely the distance between the original measurement plane and the desired plane: Delta = Z1 - Z0. When Delta > 0 the extrapolation takes place in the direction away from the magnet. When Delta < 0, the extrapolation is in the direction towards the sample. When Delta = 0 the original data is retained.
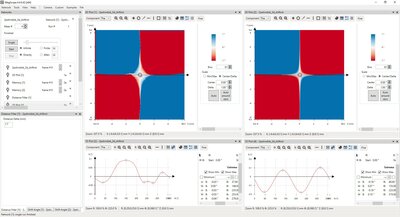
La figure 1 montre la distribution du champ magnétique Bz mesuré et la section transversale le long de la direction X à Z0 = 0,3 mm (à gauche) et le résultat du filtre à distance à Z1 = 2 mm (à droite). La valeur du Delta est donc la suivante Delta = 2mm - 0,3mm = 1,7mm.
Analyse de l'erreur Bxy et de l'erreur d'angle azimutal dans les aimants des codeurs rotatifs à 2 pôles
Dans une application finale typique, un capteur Bx,By est positionné sur l'axe de symétrie de l'aimant du codeur rotatif à une certaine distance de la surface de l'aimant, qui est généralement de plusieurs mm. À cette distance, le champ magnétique Bxy est généralement de l'ordre de 50 mT. Le capteur Bx,By mesure alors Bx et By et calcule à partir de ceux-ci l'angle dans le plan du champ magnétique en utilisant atan2(By,Bx). En raison des inhomogénéités de la distribution du champ magnétique, il y a une certaine erreur sur la valeur de l'angle mesuré. Lors du contrôle de qualité de ces aimants, cette erreur d'angle doit être déterminée avec une grande précision, généralement de l'ordre de 0,1° ou mieux. L'utilisation d'une caméra de champ magnétique en combinaison avec le filtre de distance permet d'atteindre cet objectif de manière optimale, comme le montre l'illustration ci-dessous.
Une mesure de la distribution du champ magnétique directement à la distance de travail du capteur Bx,By dans l'application ci-dessus donnerait un rapport signal/bruit moins bon qu'une mesure très proche de l'aimant (typiquement 0,3-0,5 mm). Le filtre de distance permet de "préserver" le rapport signal/bruit à des distances proches ou éloignées, ce qui permet d'obtenir des distributions de champ magnétique pratiquement exemptes de bruit.
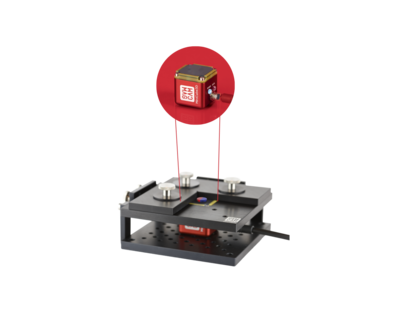
La distribution du champ magnétique en 3D est mesurée à une faible distance au-dessus de la surface de l'aimant à l'aide d'une caméra Magcam MiniCube 3D (voir Fig. 2).
Comme indiqué plus haut, les composantes du champ magnétique pertinentes pour cette application sont le champ magnétique dans le plan (Bxy) et la direction dans le plan (angle azimutal) du champ dans une région au centre de l'aimant. Ces composantes peuvent être analysées comme expliqué ci-dessous.
Composante Bxy et angle azimutal
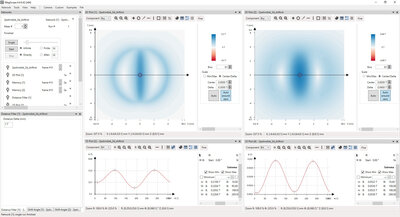
La composante Bxy est facilement obtenue à partir des composantes Bx et By du champ magnétique (Fig. 3). Un cercle centré sur le centre de l'aimant est interpolé avec un certain rayon, de 0,25 mm dans cet exemple, généralement déterminé par la zone de tolérance où le capteur Bx,By sera situé dans l'application finale. Dans le tracé obtenu, les valeurs maximales et minimales peuvent être automatiquement détectées et directement utilisées dans un test de réussite/échec pour vérifier si elles se situent dans la fenêtre de tolérance.
La deuxième quantité importante de la distribution du champ magnétique est la distribution de la direction dans le plan (angle azimutal) du champ magnétique. Cette quantité est également facilement calculée à partir des composantes Bx et By du champ magnétique en utilisant atan2(By,Bx). En analysant les valeurs extrêmes de l'angle azimutal sur la même section de cercle que précédemment, l'erreur d'angle est directement obtenue, comme le montre la figure 4.