작성자: 코엔 베르바케 박사
요약
매그캠의 3축 자기장 카메라 기술을 기반으로 로터리 엔코더 센서 자석의 노이즈 없는 자기장 분포를 측정하는 방법을 소개합니다. 이 방법은 자석 위 가까운 거리에서 2D 평면의 3축 자기장 분포를 측정하고 특허받은 '거리 필터' 알고리즘을 사용하여 이 자기장 분포를 3D 볼륨으로 외삽하여 더 먼 거리에서도 노이즈가 거의 없는 데이터를 생성하는 것입니다. 이 강력한 방법을 사용하면 원래 측정한 평면의 측정 해상도보다 더 높은 해상도로 자기장 분포와 자석의 고유 각도 오차를 평가할 수 있습니다.
배경, 동기 및 목표
전기 모터 및 회전 위치 결정 시스템 등의 각도 인코더에 널리 사용되는 2극 로터리 엔코더 자석을 자기적으로 특성화하는 방법이 제시됩니다. 이 방법은 독자적인 '거리 필터' 알고리즘을 사용하여 자석 또는 자석 어셈블리 위의 특정(가까운) 거리에서 기록된 자기장 분포를 다른(더 먼) 거리로 매우 빠르게 추정하고 측정 노이즈를 강력하게 억제할 수 있게 해줍니다. 따라서 매우 빠르고 동시에 매우 정확한 측정이 가능하여 생산 품질 관리에 적합한 방법입니다.
거리 필터 방법
거리 필터 알고리즘은 Magcam의 자기장 카메라 시스템과 함께 사용됩니다. 외삽이 자석에서 멀어지는 방향으로 이루어지면 노이즈가 강력하게 억제되어 µ테슬라 자기장 해상도를 얻을 수 있습니다. 따라서 거리 필터 알고리즘은 자석에서 먼 거리에서 직접 측정할 경우 신호 대 잡음비가 떨어지기 때문에 자석에서 멀리 떨어진 자기장 분포를 파악하는 데 매우 강력합니다.
거리 필터로 정확한 결과를 얻으려면 기록된 자기장 분포에 측정된 자석 또는 자석 어셈블리의 전체 자기장이 포함되어야 하며, 이는 측정된 자기장 이미지의 모든 가장자리에서 이미지 가장자리 바깥쪽으로 갈수록 자기장이 0을 향해 단조롭게 감소해야 한다는 의미입니다. 실제로 이는 자석 주변의 여분의 공간을 포함하여 충분히 넓은 영역을 측정해야 함을 의미합니다.
결과
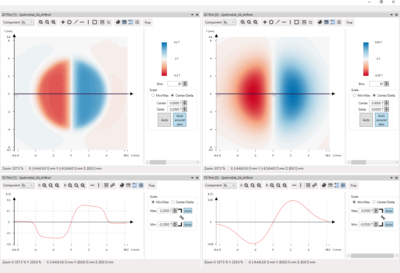
Consider a cylindrical axially magnetized 2-pole rotary encoder magnet, with the cylindrical symmetry axis pointing in the Z direction. The original measurement is in the XY plane at a certain height Z0 above the magnet surface. The magnetic field distribution at a different height Z1 is obtained by the Distance Filter method by supplying one single input parameter Delta, namely the distance between the original measurement plane and the desired plane: Delta = Z1 - Z0. When Delta > 0 the extrapolation takes place in the direction away from the magnet. When Delta < 0, the extrapolation is in the direction towards the sample. When Delta = 0 the original data is retained.
그림 1은 Z0 = 0.3mm(왼쪽)에서 측정된 Bz 자기장 분포와 X 방향의 단면을, Z1 = 2mm(오른쪽)에서 거리 필터 결과를 보여줍니다. 여기서 델타 값은 다음과 같습니다: 델타 = 2mm - 0.3mm = 1.7mm.
2극 로터리 엔코더 자석의 Bxy 및 방위각 오차 분석
일반적인 최종 애플리케이션에서 Bx,By 센서는 로터리 엔코더 자석의 대칭 축에 자석 표면으로부터 특정 거리(일반적으로 수 mm)에 배치됩니다. 이러한 거리에서 Bxy 자기장은 일반적으로 50mT 정도입니다. 그런 다음 Bx,By 센서는 Bx와 By를 측정하고 이를 통해 아탄2(By,Bx)를 사용하여 자기장의 평면 내 각도를 계산합니다. 자기장 분포의 불균일성으로 인해 이 측정된 각도 값에는 일정한 오차가 있습니다. 이러한 자석의 품질 관리 시에는 이 각도 오차를 일반적으로 0.1° 이상의 높은 정확도로 측정해야 합니다. 자기장 카메라를 거리 필터와 함께 사용하면 아래 그림과 같이 우수한 방법으로 이를 달성할 수 있습니다.
위 애플리케이션에서 Bx,By 센서의 작동 거리에서 직접 자기장 분포를 측정하면 자석에 매우 가까운 거리(일반적으로 0.3-0.5mm)에서 측정하는 것보다 신호 대 잡음비가 더 나빠집니다. 거리 필터를 사용하면 가까운 거리에서 먼 거리까지 신호 대 잡음비를 '보존'할 수 있으므로 사실상 노이즈가 없는 자기장 분포를 얻을 수 있습니다.
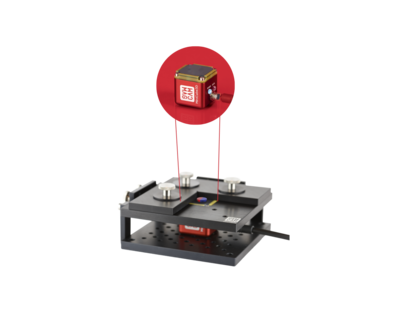
3D 자기장 분포는 Magcam MiniCube 3D 자기장 카메라를 사용하여 자석 표면 위 가까운 거리에서 측정합니다(그림 2 참조).
앞서 언급한 바와 같이, 이 애플리케이션과 관련된 자기장 구성 요소는 평면 내(Bxy) 자기장과 자석 중심 영역에서 자기장의 평면 방향(방위각)입니다. 이러한 구성 요소는 아래에 설명된 대로 분석할 수 있습니다.
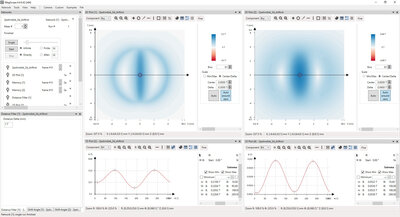
Bxy 구성 요소 및 방위각
Bxy 성분은 자기장의 Bx 및 By 성분에서 쉽게 구할 수 있습니다(그림 3). 자석 중심을 중심으로 특정 반경(이 예에서는 0.25mm로 간주)을 가진 원이 보간되며, 일반적으로 최종 애플리케이션에서 Bx,By 센서가 위치할 허용 오차 영역에 따라 결정됩니다. 획득한 라인 플롯에서 최대값과 최소값을 자동으로 감지할 수 있으며, 이를 합격/불합격 테스트에 직접 사용하여 허용 오차 범위 내에 있는지 확인할 수 있습니다.
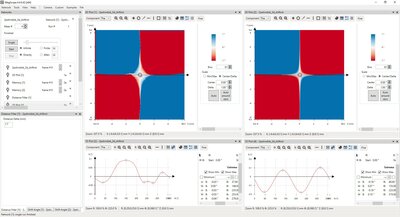
자기장 분포의 두 번째로 중요한 양은 자기장의 평면 내 방향(방위각) 분포입니다. 이 수량도 자기장의 Bx 및 By 구성 요소에서 atan2(By,Bx)를 사용하여 쉽게 계산할 수 있습니다. 그림 4와 같이 동일한 원 단면에서 방위각의 극한값을 분석하면 각도 오차를 직접 구할 수 있습니다.